Zumo Robotをどうやって動かすかで試行錯誤しています。
Zumo Robotは久しぶりに可能性を感じさせてくれるオモチャです。
以前の記事でZumoRobotによるライントレースのことを書きました。
ライントレースができたことはそれなりに楽しかったのですが、Githubにあるコードをそのまま入れれば問題なく動いたわけで満足度という意味ではチョット、という感じでした。
Zumo Robotはshieldという拡張基板を付けれるわけで色々な機能を追加すれば結構楽しめると思って買ったわけでして、いよいよ行動開始です。

ところがこれが大変なくせ者でした。
先週は1週間、悩みに悩まされ、使えない部品を買ってしまう羽目になりました。
今日は先週のことを反省してZumo Robotに関する情報を頭に入れなおすところから始めました。
すると少し光が見え始めましたので先週起きたことと今後の展開について書いていきたいと思います。
先週の顛末
調子がイマイチの時はこんなもんかと思うくらいハズレまくりました。
まずやろうとしたことは、ゲームパッドで動かすことでした。
ゲームパッドはBluetoothで動くと思い込んでBluetooth shield for arduino unoをメルカリで買いました。
姿はこんなものです。
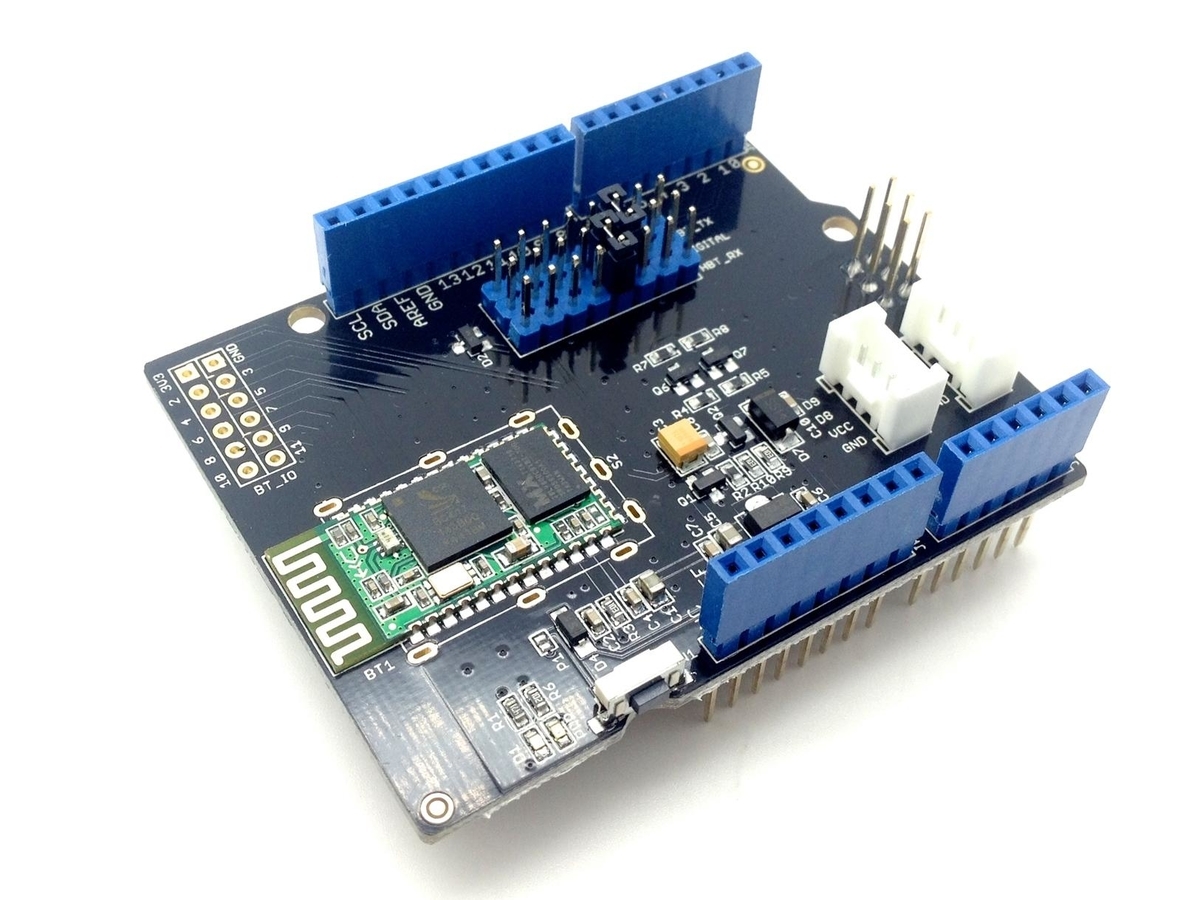
これをZumo shieldの上にコネクタで接続します。
段重ねですね。
知識不足だったというか、この基板に使っているBlutooth用のデバイスはHC-05でこれに対応する相手でないと通信できません。
このあたりのことを何も考えずに買ってしまいました。
結果、手持ちのゲームパッドでは動かない、となりました。
まず一つ目の失敗です。
ちなみにBluetooth shieldのデータはコレです。
色々調べるとAndroidタブレットとかにアプリを入れれば使えそうな感じです。
でも僕はタブレットではなくゲームパッドを使いたいなと思っていたので一旦ここで追及するのをやめました。
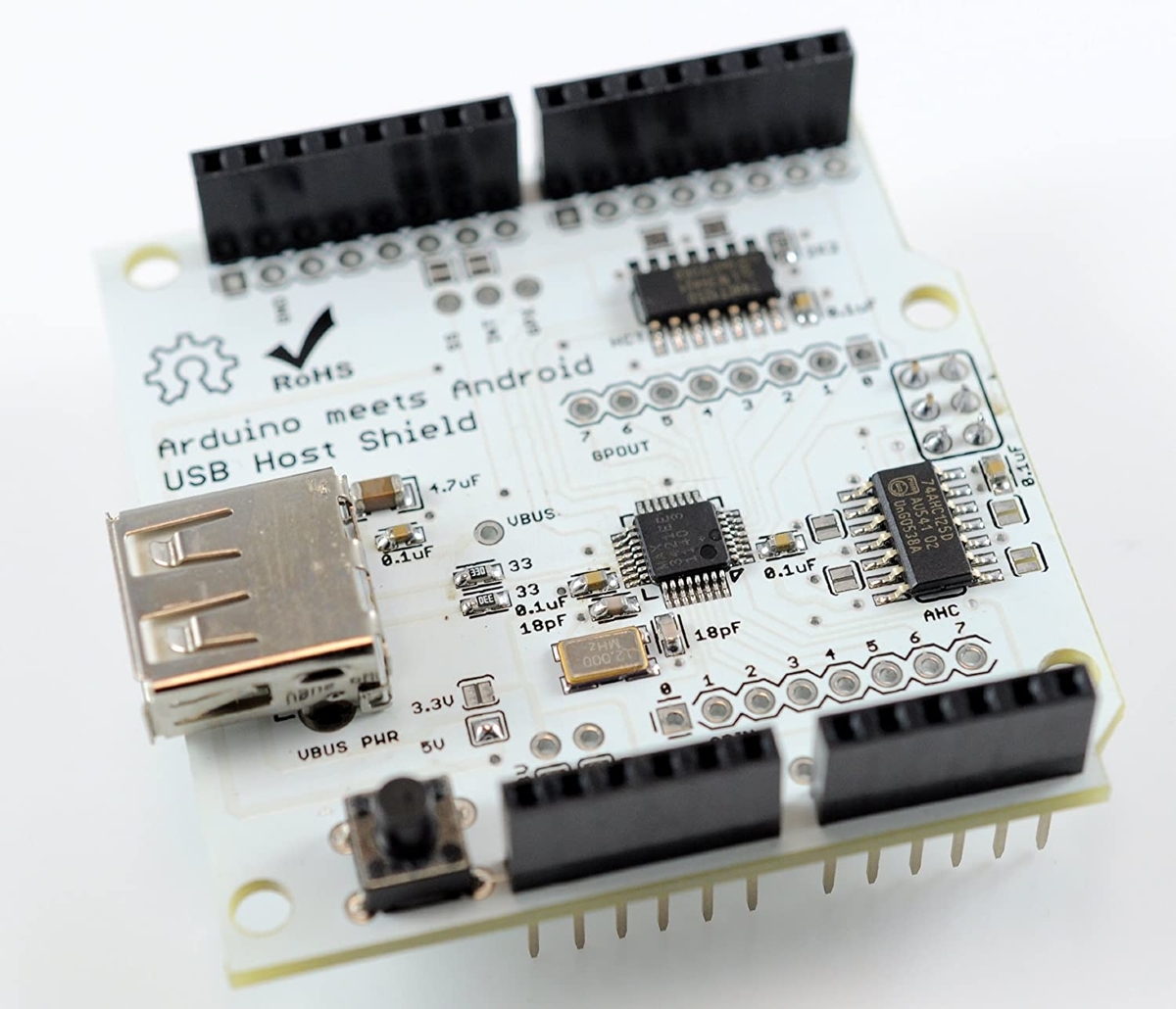
次に考えたのが、USBにゲームパッドのドングルを挿して使おう、ということです。
ということで買ったのがUSBホストシールドです。
これもメルカリで買いました。
モノはコレです。
ネットでの記事も調べArduino Unoで動くことを確認したり使うドングルとの相性があることも調べて相性の良いとされているドングルも買いました。
ところがですね、USBホストシールドをZumo Robotに実装して電源を入れた途端にZumo Robotの片側の車輪が勝手に動き始めました。
???なんで???
となり、何度かやり直しましたが結果は同じ。
だめじゃない、となりました。
多分、Zumo shield for arduinoで使っている信号とのバッティングがあるのだと思います。
これが2つ目の失敗です。
ここまでで大散財です。
そういえばZumo Robotの発売元のPololuではshieldを売っていなくて、マニュアルを読むとリモート操作に関してはRCコントローラーが出ていました。
さてどうしようと思い悩み、初心に帰ってZumo Robotのマニュアルをキチンと読むことにしました。
最初からチャンと読まないとダメですね。
Zumo Robotのマニュアルはコチラ。
このなかに、Zumo Robotにはどういう機能があって、その機能のために信号のどれを使っていて、別の機能を搭載するときに当該機能を無効にするにはどうすれば良いかということが書かれています。
回路図もあるので判りやすいです。
マニュアルを見ながら思うようにいかなかった原因を調べようと思います。
今の姿での修正案としては、
1)Bluetooth ShieldをAndroidで使ってみる。
まずこれが一番ですね。
Androidタブレットとの接続確認はできました。
あとはアプリが動くようにすればOKと思います。
ネットで調査は必要ですが大丈夫かなと思います。
でも、これは暫定であってあくまでもコントローラでの操作を目指したいと
思います。
2)USBホストシールドの問題点を見つけ対応する。
信号のバッティングであれば解決可能とは思います。
1)が終わってからやって妙と思います。
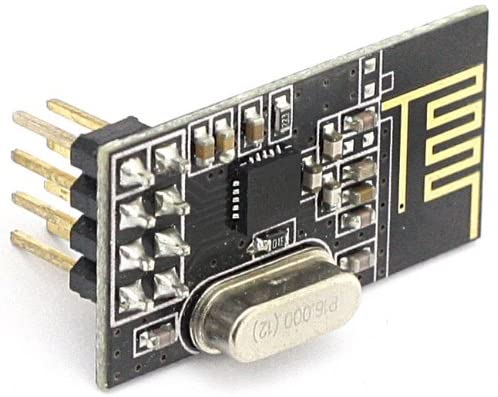
3)BluetoothのデバイスとしてHC-05ではなくNRF24L01を使うように追加の
ハードを載せる。
これはNRF24L01を使ったジョイスティック付きコントローラをクモ型ロボット
用に持っているのでその活用を図るものです。
NRF24L01のモジュールはこれなので実装には結構な手間がかかりそうです。
今回の件で、Arduinoのshieldについて色々と調べました。
Zumo Robotにおける最大の問題はArduinoを裏返しで搭載することで、その結果、
全てのShieldも裏返しで搭載します。
これが不便極まりないのです。
LCDを載せているshieldはLCDが見えない、外からの配線を持ってこようにも
接続のコネクタがつけられない、本当にやりにくいです。
ということで本件をやるためには、何らかの工夫が必要で時間をかけて考えて
みようと思います。
先々も悩みそうなので。
4)RCコントローラを使えるようにする。
Zumo Robotのマニュアルの中にRCコントローラが出ていたこともあり、今は
Zumo RobotをRCコントローラ(プロポ)で動かそうかな、と思っています。
下の記事がその説明です。
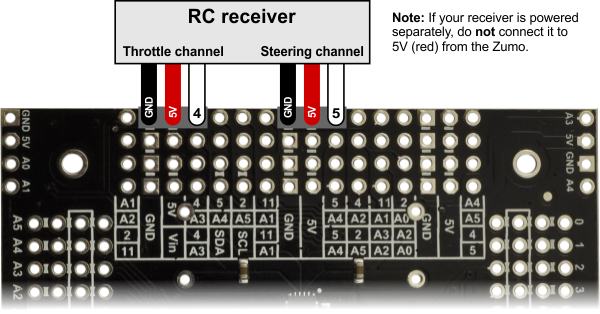
Zumo RobotにRC受信機を搭載することになります。
ちなみにこんな感じになります。

また接続はコレです。
スロットルとステアリング用の信号を割り当てています。
これも要注意で、ラインセンサ用の信号とバッティングしている可能性が
ありますので場合によっては信号配置を変えます。
また出費か?という面はありますが、今までに購入した部品は別で活用すれば
OKなので何の問題もありません。
1)で動くようにしながら、並行してRCコントローラの調達に入ります。
高いものは買えないので安いので我慢です。
今の候補はコレです。
 コントローラトランスミッター")
ということでZumo Robotを動かすことに注力します。
今日はここまで。
では、また。
(参考動画)
RCコントローラの使用例です。