超音波センサHC-SR04を動かしました。
思ったより簡単に動きました。
あれ?できちゃった、というぐらい簡単でした。
間違えたのは超音波センサへの配線ぐらいです。

配線の間違いを2か所でやってしまいました。
一つは、5V電源を逆に繋いでしまい気が付かずに何分か後に超音波センサに触ってみたところものすごく熱くなっていて給電を間違えたことに気づきました。
もう一つは、超音波センサの信号の意味を確認せずに下の図を信じて配線したのですが、信号を具体的にどのピンに配置しようかとコードを調べ始めたところ間違っていることに気づきました。

Trigは出力でEchoは入力なのに2つの信号を短絡していました。
チャンと調べないとダメですね。
この2つの配線間違いを治したらスムーズに動きました。
超音波センサHC-SR04の動作原理はコレ
HC-SR04は超音波モジュールの送信部から40KHzのパルスを出力し、そのパルスが物体にあたって帰ってくるまでの時間を測定することで物体までの時間を測定するというものです。
タイムチャートはコレです。
Trigger信号をLow⇒High⇒Lowとすることで40KHzAcousticBurstに8このパルス信号が出力され、8個のパルス信号を送り終わったときからOutput of ECHO PinにHighのパルスとして信号が入ってきて、これが40KHzReflected Signalが帰ってくるまで続きます。
Output of ECHO Pinの信号受信時間と超音波の速度(音速)を用いて距離の計算をします。
そのコードがコチラ。

そして動かした結果がコチラ。
まずは超音波センサの前に下の写真のように何も置かなかったとき。

測定結果は95cmとか96cmとなりました。

次に超音波センサの前に手を置いて、近づけたり離したりした時。
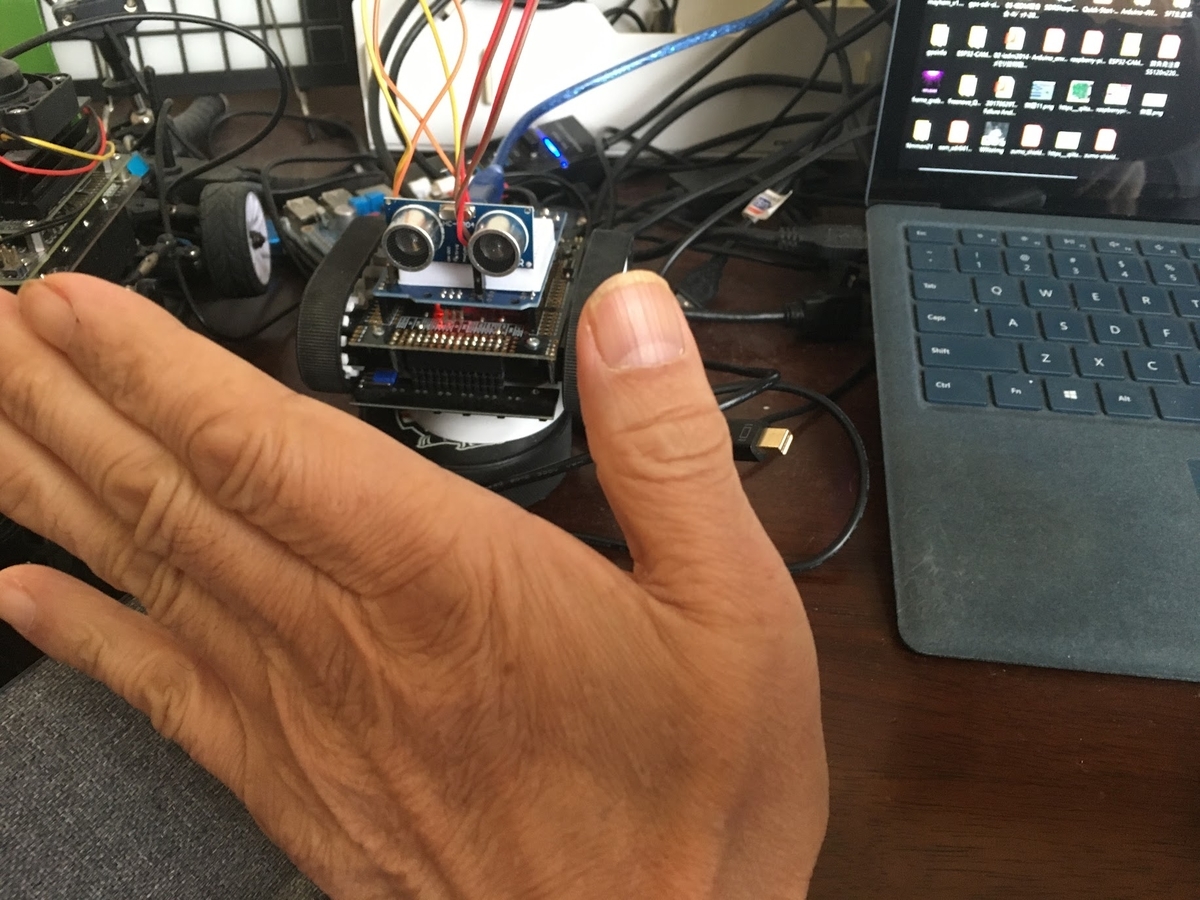
10cmぐらいから90cmぐらいまで値が動いているのが判ります。

一番近づけたらどうなるかと調べた結果がコチラ。
最少は2cmとなりました。

これで使い方も判りましたので、いよいよZumo Robotのコードに組み込んで自走Robotを作ってみようと思います。
ということで今日はここまで。
では、また。