Arduinoにハマってしまうかもしれません。
Zumo shield for arduinoを買いました。
クモ型ロボットを動かそうとしている記事を以前書きました。
クモ型ロボットにはマイコンとしてarduinoが使われています。
僕は大昔、年で言うと40年前にはCPUとして6809を載せたマイコンを使ったり自分で設計したりしていました。
30代半ばには電子回路の設計をやる機会も無くなりリタイヤした後に、久々にマイコンを触り始めたという次第です。
触り始めたマイコンは、Raspberry Piであり、これはとても扱いやすく色々なことができて結構楽しめました。
次に手に入れたのが、Jetson nanoでこれはこれでRaspberry Piとはまた違った面白さがありました。
そして今回手に入れようと思ったのがarduinoです。
ということでまたまた衝動買いをしてしまいました。
今回もメルカリで買いました。
まずは、コレ。
Zumo shield for arduinoです。
実物はコレです。
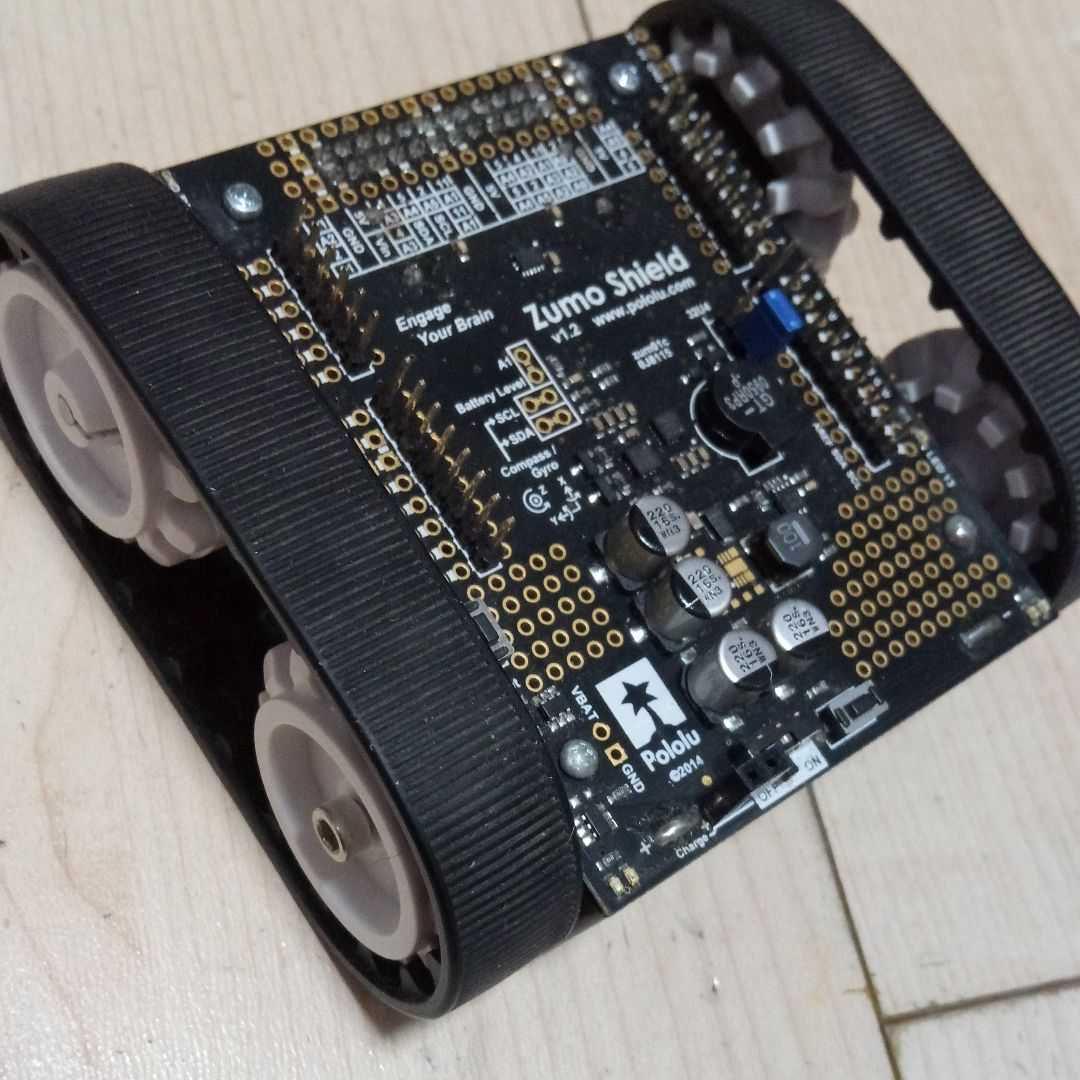
これには走行用のモータとドライバが付いています。
これにコントロール用のarduino unoを載せます。
それがコレ。
実物はコレ。
これでロボット自体は走行できるのですが、それだけでは面白くないのでRaspberry Piも載せることにしました。
そうやって組みあがったのがコレ。
上から順に、Raspberry Pi4、arduino uno、Zumo shield for arduinoとなります。
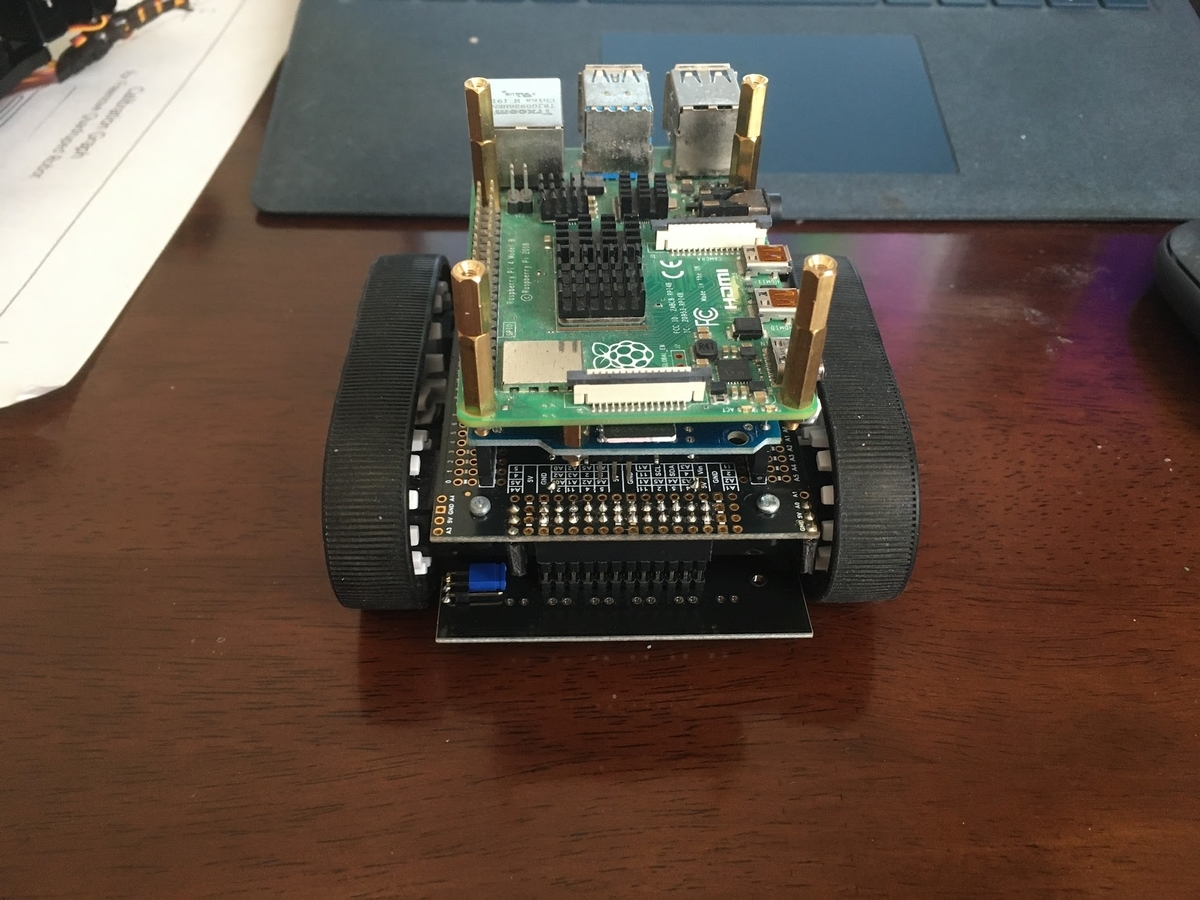
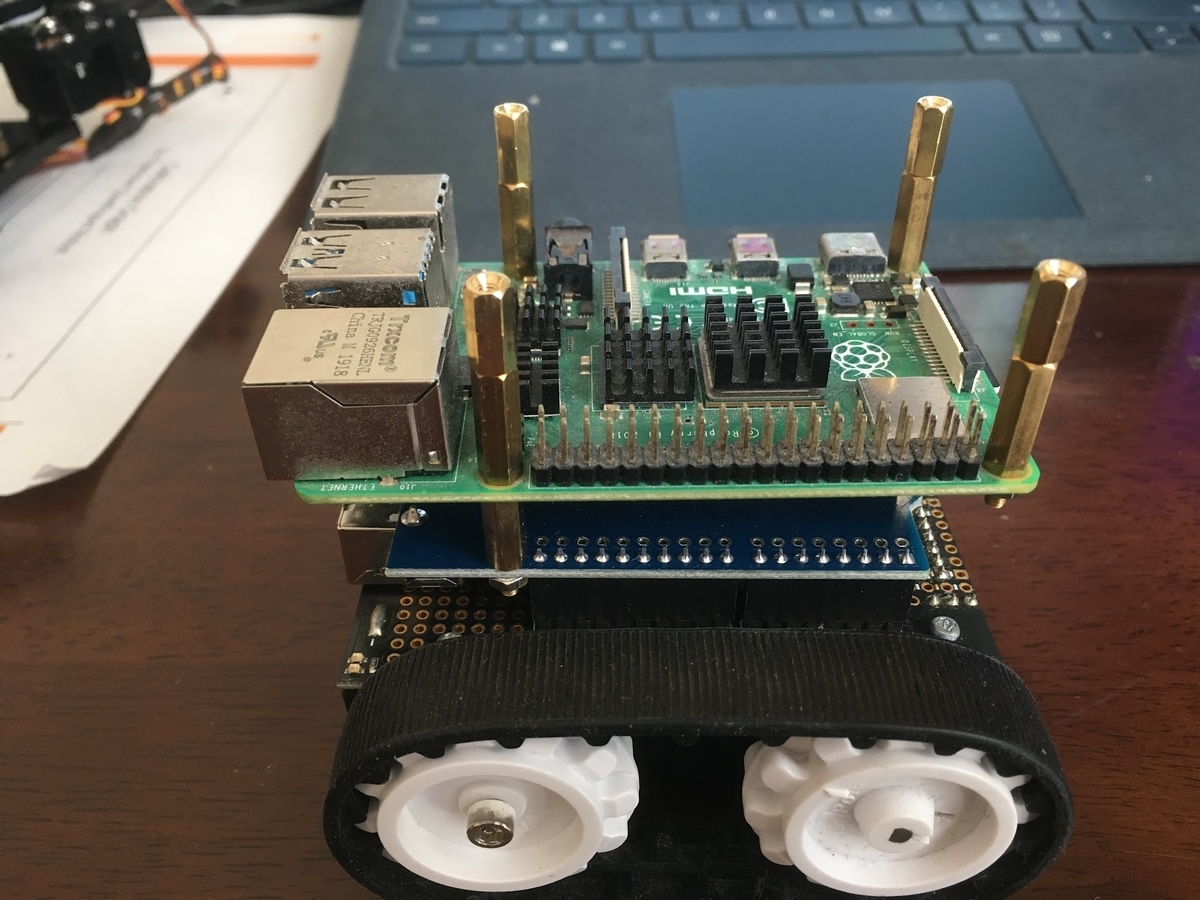
arduino unoとZumo shield for arduinoはコネクタで繋がっています。
Raspberry Piとarduino unoはUSBで繋ごうと思っています。
でも、これが出来るのはとうぶん策になる可能性もあるのでZumo shield for arduinoとarduinoだけで遊べるようにZumo shield for arduinoにラインセンサを付けることとしました。
これがあればライントレースで走らせることができます。
手に入れたラインセンサーがコレ。
実物はコレ。
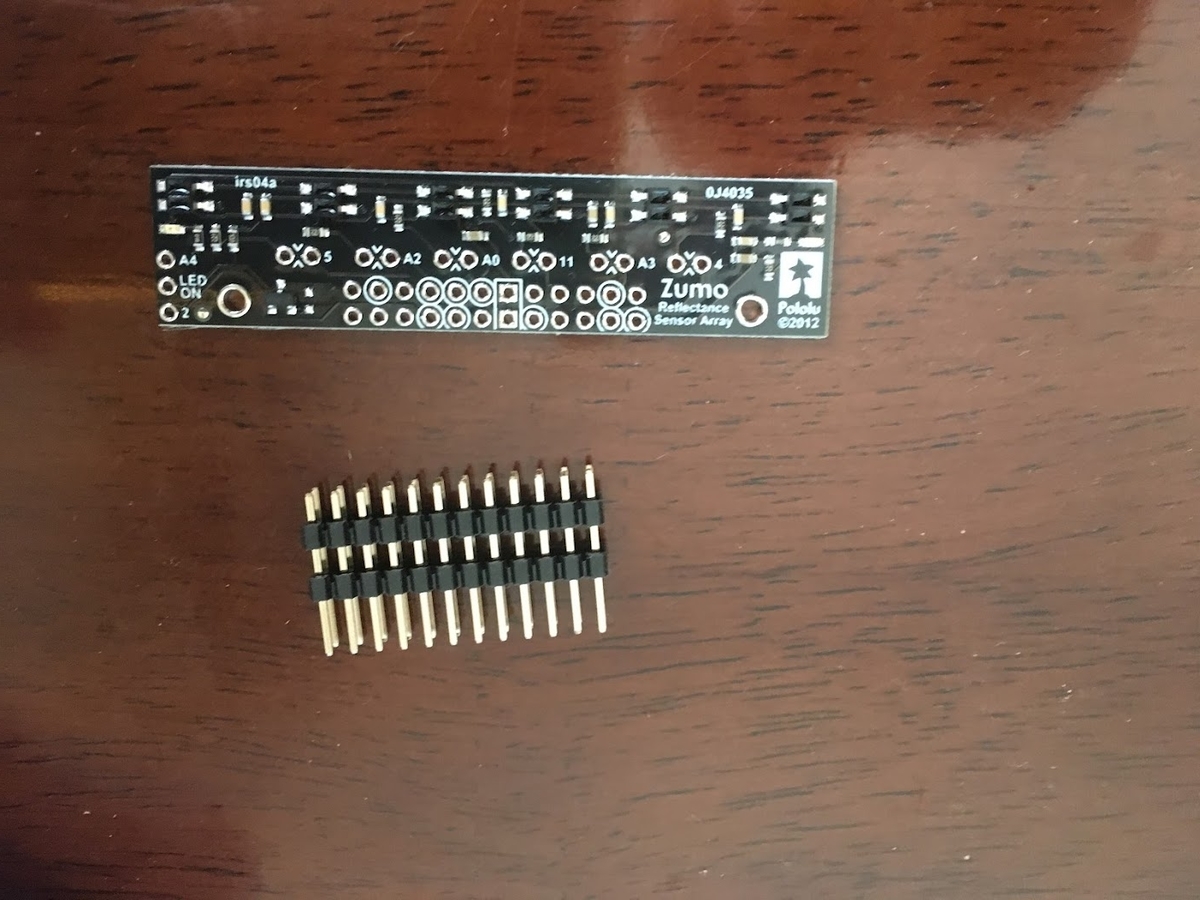
なんとハンダ付けを自分でやらないといけませんでした。
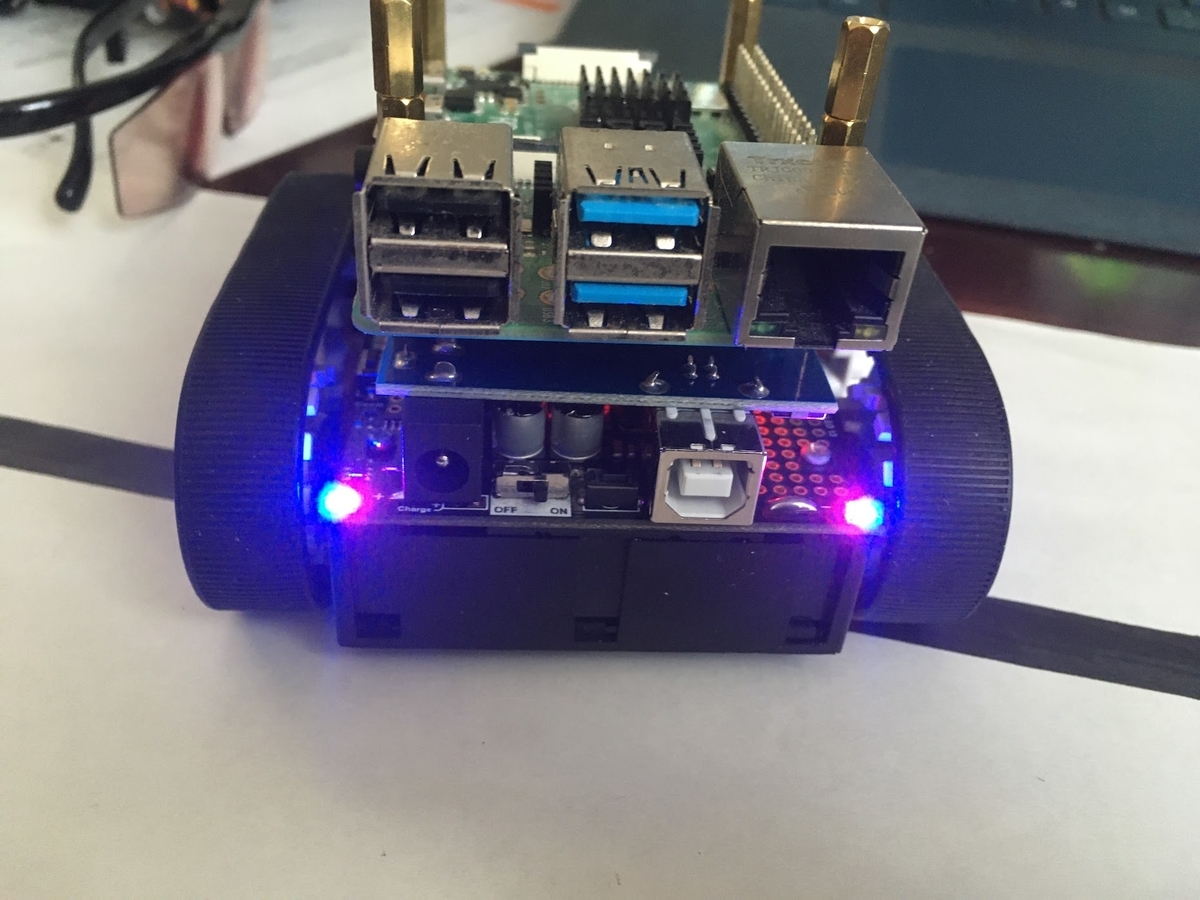
ハンダ付けをしてZumo shield for arduinoに取り付けた姿がコレ。

正面から見た姿がコレ。
Zumo shield for arduinoの下にあるのがソレです。
ハードの準備ができましたのでソフトのインストールにかかります。
Arduino IDEを使います。

クモ型ロボットを動かす時にarduino ideをパソコンにインストールしましたので今回はそれを使います。
開発環境は準備できているのでアプリのインストールに入ります。
いつものGithubでアプリをゲット。
それがコレ。
ここには色々なアプリが入っています。
ライントレースも入っています。
簡単にできるだろうと思ったらハマってしまいました。
アプリをインストールしコンパイルしてarduinoに書き込むときにエラーが出てしまいました。
原因が判らず色々と調べた結果、下の記事を見つけました。
この記事に従って調べたところ原因はボードの種別が違っていたことでした。
クモ型ロボットに使われていたarduinoのタイプはarduino unoではありませんでした。
今回の作業の前にはクモ型ロボットのアプリを動かしていたのでボードタイプがarduino unoではないものになっていました。
こういう基本的なところで間違えていると判りにくいものです。
ボードタイプをarduino unoにすると問題なく書き込め、めでたしめでたし。
それでは動かします。
まずは簡単なルートでテスト走行です。
以前、メカナムロボットをカメラを使っての自動でのライントレース走行させたときの走行路というか紙がありましたので再利用しました。
では、電源ON
ラインセンサも動いているようです。

それでは位置について、

走行開始
なかなかの速度で走っています。
動くことが判りましたので、これで色々なことを試してみることができます。
今日追加でBluetoothシールドをメルカリで手配しました。
これが届いたらこのロボットをBluetoothでゲームパッドを使って動かせるようにしてみようと思います。
今日はココまで。
では、また。